Научно-исследовательская лаборатория технологий беспилотного транспорта ДГТУ создана приказом ректора от 25 октября 2022 г №278 г. в рамках реализации проекта «Разработка беспилотных технологий на основе комплексной поэтапной оптимизации с редукцией экстремальных задач и инструментов нейро-нечеткого моделирования».
Целью деятельности Лаборатории является разработка опытного образца беспилотного летательного аппарата с интеллектуальной информационно-управляющей системой, построенной на основе решений задач оценки и управления с использованием концепции поэтапного синтеза и редукции задачи Лагранжа к изопериметрической при расширении информационного обеспечения за счет использования радара миллиметрового диапазона и голографического микрофона в условиях ограниченной доступности комплектующих.
Основные результаты, полученные в рамках реализации проекта «Разработка беспилотных технологий на основе комплексной поэтапной оптимизации с редукцией экстремальных задач и инструментов нейро-нечеткого моделирования»:
- Разработан макет голографического микрофона;
- Разработаны элементы операционной системы реального времени для полетного контроллера беспилотных аппаратов с бортовой инерциальной навигационной системой и возможностью автономного движения;
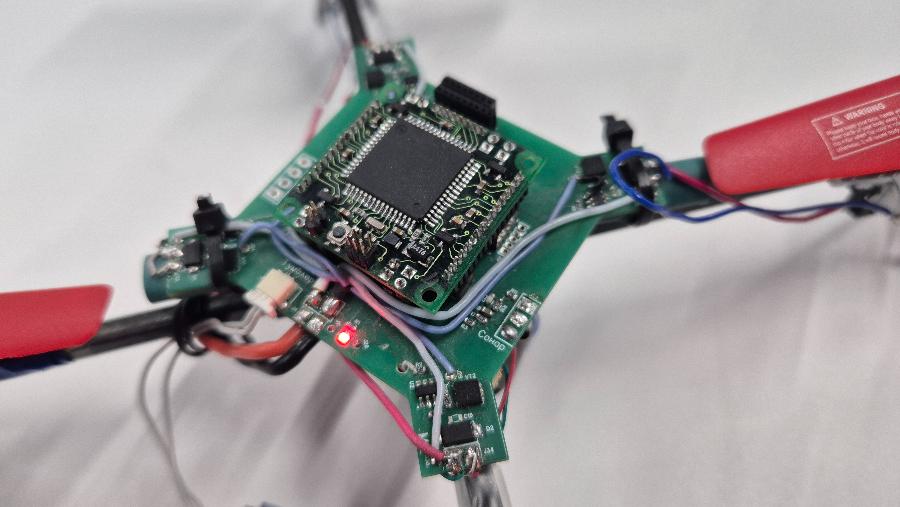
- Разработаны тестовые версии полетного контроллера, которые установлены в колесные роботы-балансиры и беспилотные летательные аппараты (БПЛА);
- Разработан макет радиовысотомера на основе радара MIMO;
- Разработан макет БПЛА для проведения испытаний в нескольких режимах.

Научно-исследовательская лаборатория «Технологии беспилотного транспорта»
Режимы испытаний
Режим стабилизации. Летательный аппарат автоматически поддерживает нулевой крен, тангаж и стабилизирует курс
Режим удержания высоты. Аппарат автоматически выдерживает высоту, которая была на момент включения данного режима.
Режим удержания позиции. Аппарат автоматически выдерживает позицию, которая была на момент включения данного режима.
Режим возврата на точку старта. Аппарат независимо от его текущего положения автоматически возвращается на заданную точку и переходит в режим удержания позиции.
Режим автоматического движения по заранее заданному маршруту.
Режим автоматического взлета и посадки.

Лазаренко Сергей Валерьевич
Заведующий лабораторией, кандидат технических наук, доцент